无垂尾的eVTOL的通过动力驱动和控制分配

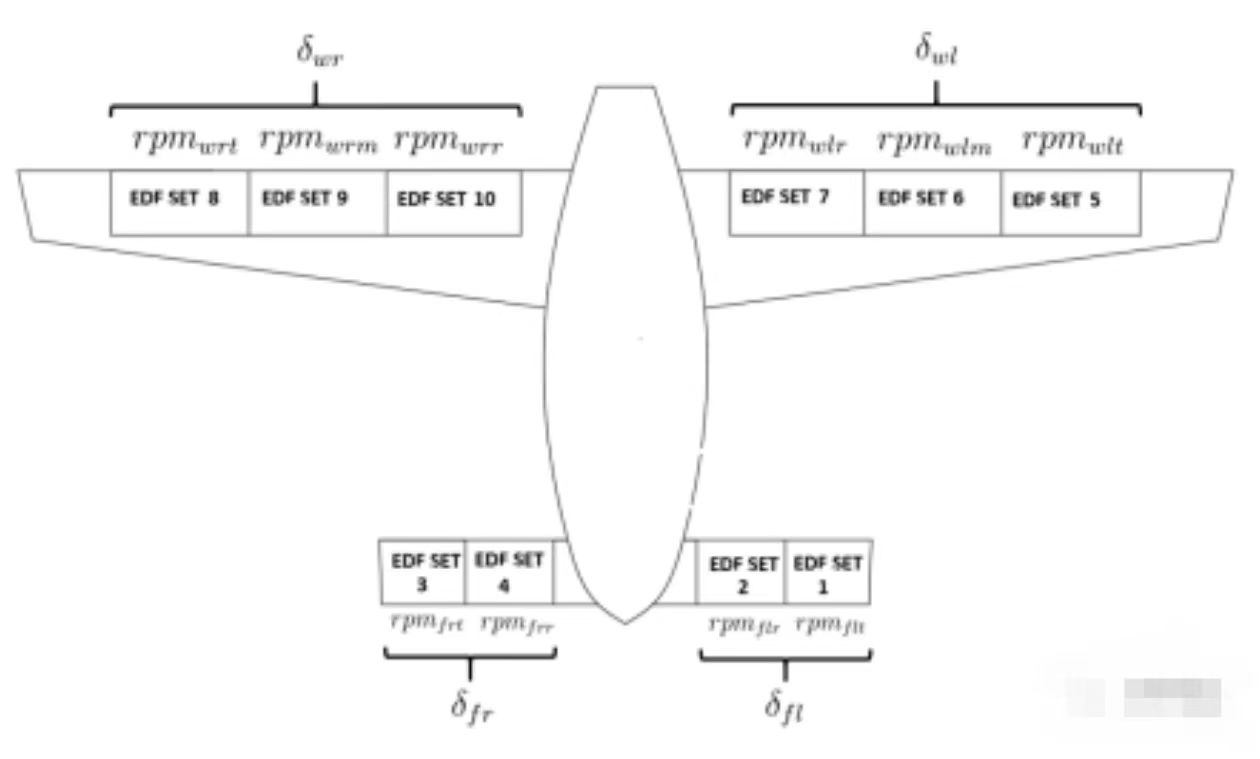
本文空中出租车被归类为具有固定翼的远程DEP eVTOL空中出租车,其具有独特的配置。与其他研究相比,主要的区别是空中出租车没有任何传统的控制和稳定面(例如副翼、方向舵、升降舵、水平和垂直尾翼),而使用纯推力矢量控制来实现全包线电传控制。考虑到eVTOL空中出租车概念航程/续航能力和重量限制,这种设计选择有几个优点。首先,飞机在高速向前飞行时在空气动力学上更有效,因为水平/垂直尾翼不会引起额外的阻力。本文没有对尾翼阻力贡献进行详细的研究。然而,可以说,无尾设计可以提高空气动力学效率,尤其是在高速巡航飞行中。另一个优点是节省了重量和空间。考虑到沉重的电池系统对eVTOL空中出租车的重量限制,避免任何额外的重量是非常有利的。关于节省的空间,18个EDF分布在机翼面的后缘上。因此,副翼的放置需要额外的空间。总之,不具有传统的控制和稳定面,可以提高空气动力学效率,节省重量和空间,并提供总体设计灵活性。另一方面,飞行控制变得更加复杂,因为不存在从控制和稳定面获得的好处。
关于系统过度驱动问题,飞机使用高度耦合的纯推力矢量控制。因此,在致动器饱和的情况下CA问题变得更加复杂,因为控制轴和控制效应器/致动器之间不存在直接关系。在具有主控制面升降舵、副翼减速器的传统飞机中,它是一种在纵向和横向通道中解耦飞机动力学的常用方法。然后,使用解耦动力学和经典饱和解决方法可以很容易地解决与致动器饱和相关的问题。例如,升降舵与纵向俯仰动力学直接相关,副翼/方向舵分别与侧滚和偏航动力学相关。然后,升降舵的饱和与俯仰动力学指令有关,如果忽略横滚和偏航运动之间的所有耦合,则相同的方法对横滚/偏航动力学有效。总之,对于所研究空中出租车的过驱动和高度耦合的纯推力矢量控制,应用经典的饱和求解方法并不容易实现。

CA的正确设计对于导致控制权限受限(即致动器饱和)的特定飞行条件至关重要。当INDI控制器产生超出物理致动器限制的致动器指令时,CA必须通过优先考虑旋转轴来保证稳定飞行。为了说明,假设飞行员在悬停飞行时应用垂直速度指令爬升。悬停时的垂直速度指令是通过在所有EDF下增加推力/rpm产生。然后,出现强烈扰动/阵风,并使空中出租车明显侧倾。为了抑制对侧倾角的干扰,一些EDF进一步提高转速,并最终达到最大转速限制。如果飞行员仍然应用垂直速度指令,那么可用的控制权限将不足以跟踪垂直速度指令并拒绝侧倾角干扰。换言之,INDI控制器的致动器指令和物理实现的致动器状态之间将存在误差。一个好的飞行员可能会意识到这个问题,并释放垂直速度指令以提供控制权限。然后,执行器将不会达到转速限制,控制权限将可用于拒绝侧倾角度扰动。飞行员本能地将旋转控制置于平移控制之上。然而,这给飞行员带来了更大的负担,并且考虑到宽的飞行包线,需要一种系统的方式来处理致动器饱和。考虑到过渡区域,推力矢量控制是高度耦合的,飞行员可能不会做出正确的决定来解决致动器饱和问题,并保证所有情况下的稳定飞行。该示例场景通过非线性模拟进行测试,以验证CA设计。结果表明,在控制权限有限的情况下,CA显著改善了干扰抑制特性,并在保证稳定飞行方面发挥了至关重要的作用。
由于在致动器饱和的情况下,简单CA方法的性能不令人满意,因此需要设计一种基于约束优化的CA算法。