轻型直升机分布式电驱动反扭矩系统构型方案的综合评估技术研究 (上)

直升机尾桨是用来平衡主旋翼反扭矩和对直升机进行偏航操纵的部件。传统机械式尾桨一般由中间传动轴、中间减速器、尾传动轴、尾减速器等组成,具有结构强度较高、技术应用成熟等优点,但仍存在一系列问题,主要有:(1)机械传动链长,结构复杂,造成维修成本高、耗时长;(2)尾桨故障率高,据统计,由尾桨系统引发的事故,占直升机事故总数的15%以上,如美国西科斯基公司的“黑鹰”直升机便发生过因尾桨传动轴断裂,导致多名高级军官同直升机坠亡事故;(3)尾桨功率消耗较大,约占总功率的7%~10%,传动效率低。为解决上述问题,人们开始探索新的直升机反扭矩系统,用以替代传统的机械式尾桨。
在当前绿色航空背景下,电动飞机、电动垂直起降飞行器(eVTOL)正在蓬勃发展,据美国VFS统计,全球已启动接近600 个eVTOL 项目。受此启示,有些直升机制造商开始尝试采用电动机驱动尾桨,如2016年莱昂纳多公司与英国布里斯托大学合作,在一架AW139直升机的尾梁上改装了一个电动尾桨,并进行了长达10h 的地面试验。2020年,贝尔公司公开了一架采用4 个涵道风扇代替传统尾桨的贝尔429 验证机,贝尔将该多涵道尾桨称为电驱动反扭矩(EDAT)系统,这是全球首次采用此类多旋翼电驱动尾桨的直升机,该验证机已经在2019 年5 月开始试飞。国内很多学者也对电驱动反扭矩系统进行了大量研究。2018年,清华大学王洋等申请了一项“一种直升机电动尾桨驱动装置”的发明专利,通过三个串联电机驱动尾桨,可保证各电机都在高效的范围内工作,提高系统效率。2019年,电子科技大学王飞等开展了小型无人直升机电动尾桨控制方法研究,采用非线性自抗扰控制方法实现了对直升机电动尾桨偏航通道的控制。电动尾桨具有结构简单、绿色环保、低噪声、低振动、易维护等优点,此外,电动尾桨与直升机主旋翼解耦,可提高尾桨控制的灵活性。
本文基于某国产2t 级直升机尾桨系统(见图1),在满足抗侧风能力与原准样机相当的前提下,开展了分布式电驱动反扭矩系统构型方案研究与综合评估分析,对未来前景进行了展望。在ISA状态和海平面高度,该直升机以最大起飞重量(质量)无地效悬停时,尾桨需提供拉力140kgf(约1400N)。

图1 某国产2t级直升机尾桨系统
1电驱动反扭矩系统构型方案
电驱动反扭矩系统由发动机直接驱动发电机供电,经控制系统后供给驱动电机,实现对尾桨的驱动和控制。尾桨电传动方式主要包括电机直驱、电机加动静轴和电机加减速器等。其中,电机直驱方式的传动链短、安装维护方便、系统效率高,并且鉴于航空电机、电调等技术不断发展,电机直驱构型未来最有应用发展前景,为此本文选取电机直驱构型。
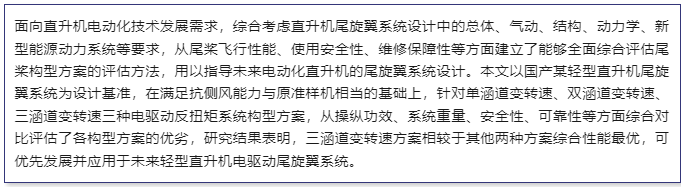
一、单电机直驱+变转速控制构型
单电机直驱加变转速控制构型方案是在满足性能参数前提下,取消尾传动系统,主减速器直接驱动发电机,经调节后为尾桨驱动电机供电,直接驱动尾桨叶;去除尾桨变距系统,采用尾桨毂与桨叶固定结构(固定桨距角);采用驱动电机,通过调节驱动电机转速来调整尾桨推力大小,构型方案架构如图2 所示。其中,发电机选用60kVA电力容量,频率400Hz,电压120/208V的大功率发电机,采用油冷方式,重量约20kg。尾桨驱动电机按单旋翼变桨距尾桨功率及转速需求,并且考虑重量及尺寸限制,选用60kW的轴向磁通同步永磁电机,采用空气冷却方式,重量约20kg。尾桨参数基本不变,桨距角取21.1°,转速在0~2043r/min之间变化。
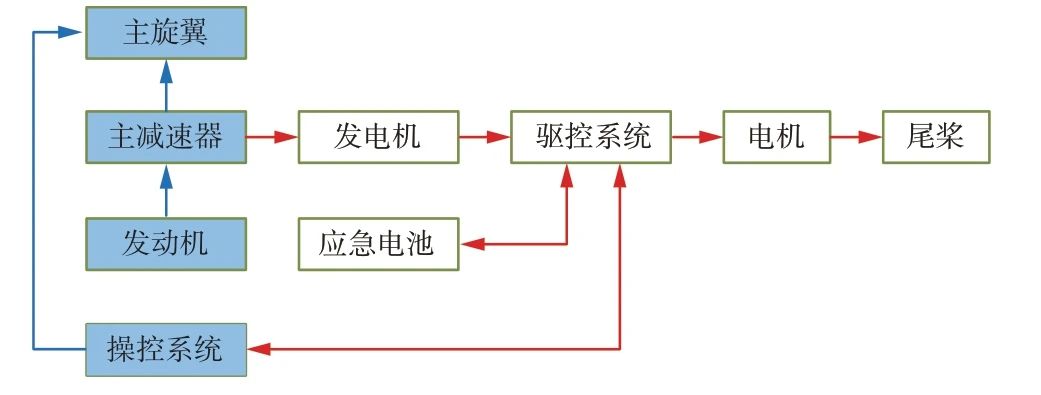
图2 单电机变转速构型
经估算,采用这种构型,总体参数保持不变,电动尾桨产生的最大正、负拉力与原尾桨相当,飞行特性基本没有变化,满足适航规章CCAR-27部要求。按GJB 902—1990评价的飞行品质等级与原机相当。通过飞控系统调节可以保证脚蹬操纵与尾桨拉力保持线性关系。但由于受桨叶刚度和重量影响,由最大正拉力到最大负拉力转换时间比原来由桨距调节方式要慢,不满足CCAR-27部关于操纵性和机动性的要求。
二、双电机直驱+变转速控制构型
采用双电机直驱加变转速控制构型方案是在提高全机抗侧风能力的同时,主要考虑提供故障冗余,即在任意一个涵道尾桨故障情况下,还有一个涵道尾桨可以保证最大起飞重量悬停着陆,保证大部分飞行状态下直升机正常使用。这种构型方案是在满足性能参数前提下,取消尾传动、控制杆系等,主减速器直接驱动60kVA发电机,经调节后为持续功率35kW、峰值功率60kW 的两个尾桨驱动电机供电,直接驱动两个固定桨距的涵道尾桨,构型方案架构如图3 所示。这种构型需要重新设计尾桨气动外形、尾桨叶和桨距角,如图4所示。
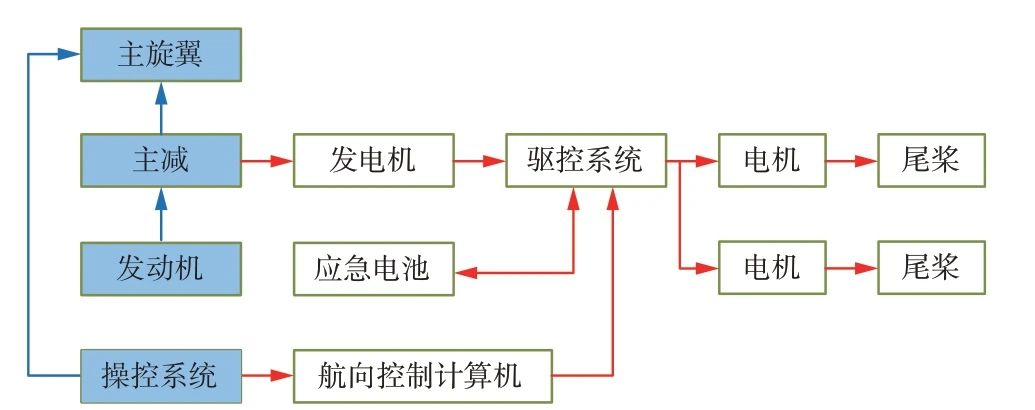
图3 双电机变转速构型
图4 双涵道变转速理论外形
经估算,采用这种构型后,总体参数保持不变,电动尾桨产生的最大正、负拉力与原尾桨相当,飞行特性基本没有变化,满足适航规章CCAR-27 部要求。按GJB 902—1990评价的飞行品质等级与原机相当。通过飞控系统调节可以保证脚蹬操纵与尾桨拉力保持线性关系。当单个尾桨故障失效后,由于驱动电机峰值功率较高,仍可保持原机尾桨能力,可满足无风条件下悬停及大部分速度下的平飞要求,以及CCAR-27 部关于操纵性和机动性的要求。这种构型的好处是当两个涵道尾桨正常工作时,尾桨能力较原机尾桨富余较多,安全裕度较高。
三、三电机直驱+变转速控制构型
开展三电机直驱加变转速控制构型设计主要考虑任一尾桨故障后,余下两个尾桨可以保持原机尾桨能力。在满足性能参数前提下,取消尾传动系统,主减速器直接驱动60kVA发电机,经调节后为持续功率20kW、峰值功率35kW的三个尾桨驱动电机供电,直接驱动三个固定桨距的涵道尾桨,构型方案架构如图5 所示。这种构型需要重新设计尾桨气动外形、尾桨叶和桨距角,如图6所示。
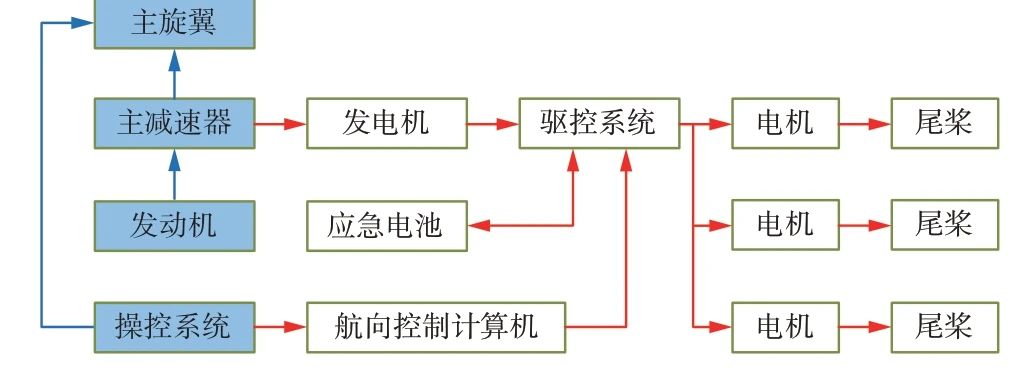
图5 三电机变转速构型
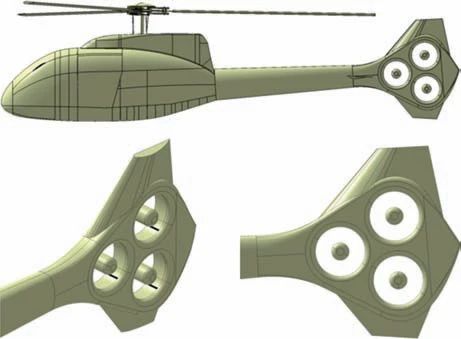
图6 三涵道变转速理论外形
经估算,采用这种构型后,总体参数保持不变,电动尾桨产生的最大正、负拉力与原尾桨相当,飞行特性基本没有变化,满足适航规章CCAR-27部要求。按GJB 902—1990评价的飞行品质等级与原机相当。通过飞控系统调节可以保证脚蹬操纵与尾桨拉力保持线性关系。这种构型的好处是当三个涵道尾桨正常时,尾桨能力较原机尾桨富余较多,安全裕度较高;当单个尾桨故障失效后,另两个驱动电机峰值功率仍可保持原机尾桨能力,可满足无风条件下悬停及大部分速度下的平飞需求,以及CCAR-27部关于操纵性和机动性的要求。