在即将到来的无人驾驶时代,操纵品质还有必要?
在即将到来的无人驾驶时代,操纵品质还有必要?
对于无人驾驶和有人驾驶eVTOL的区别更多体现在对外外部环境的感知和认知上,而对于eVTOL飞行器的内部认知上,其实无论是无人驾驶也好,还是有人驾驶也好,都已经达到了可以自动飞行的水平;所以关于无人驾驶,我们更应该关注整机对于外部的世界认知和连接上。

随着飞行器无人化趋势的愈加明显,我们今天讨论一下关于传统载人飞行器和无人机驾驶飞行器操纵品质的话题。操纵品质通常被用来定义飞机的某些品质或特征,这些品质或特征决定了飞行员是否能够轻松准确地执行飞机角色的任务。它本质上是体现了飞行员工作量和飞机性能之间的一种平衡。
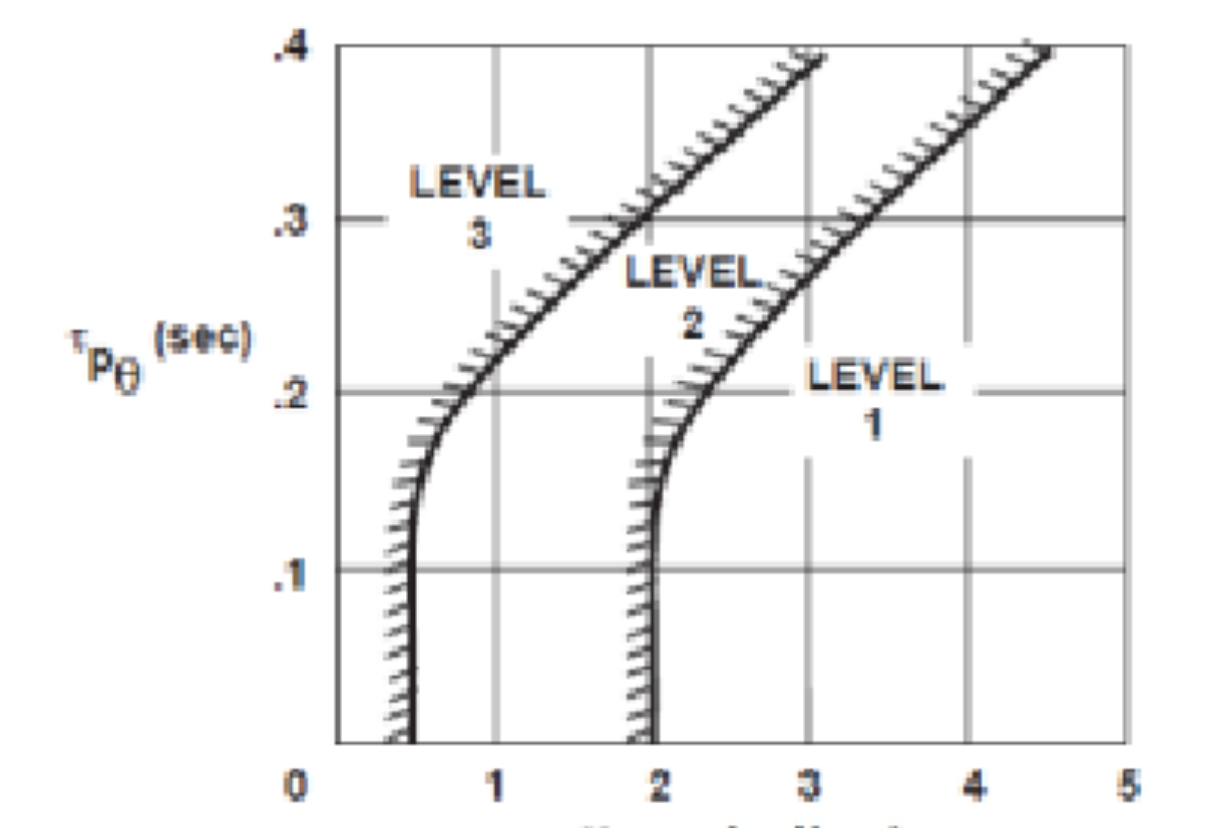
通常对于载人的操纵品质从定性的角度看,可以采用库珀-哈珀操纵品质等级(HQR),从1级(最佳)到10级(最差);从定量的角度看,美国陆军开发了ADS-33E-PRF(陆军旋翼飞行器的操纵品质要求)。
那么对于今天的无人驾驶载人或者非载人的飞行器,我们还需要考虑操纵品质设计开发这一问题嘛。解答这一问题,我们首先要搞清楚谁代替了飞行员的功能,显然整机管理系统是无人驾驶概念的核心所在,它的功能涵盖了原来飞行员和驾驶舱接口等功能。这就相当于,和之前飞行员设计相关的任务会部分迁移到整机管理系统上来,我们仍然需要通过设计整机管理系统来实现所期望的整机操纵(远程接管)或者任务品质(乘客体验)。
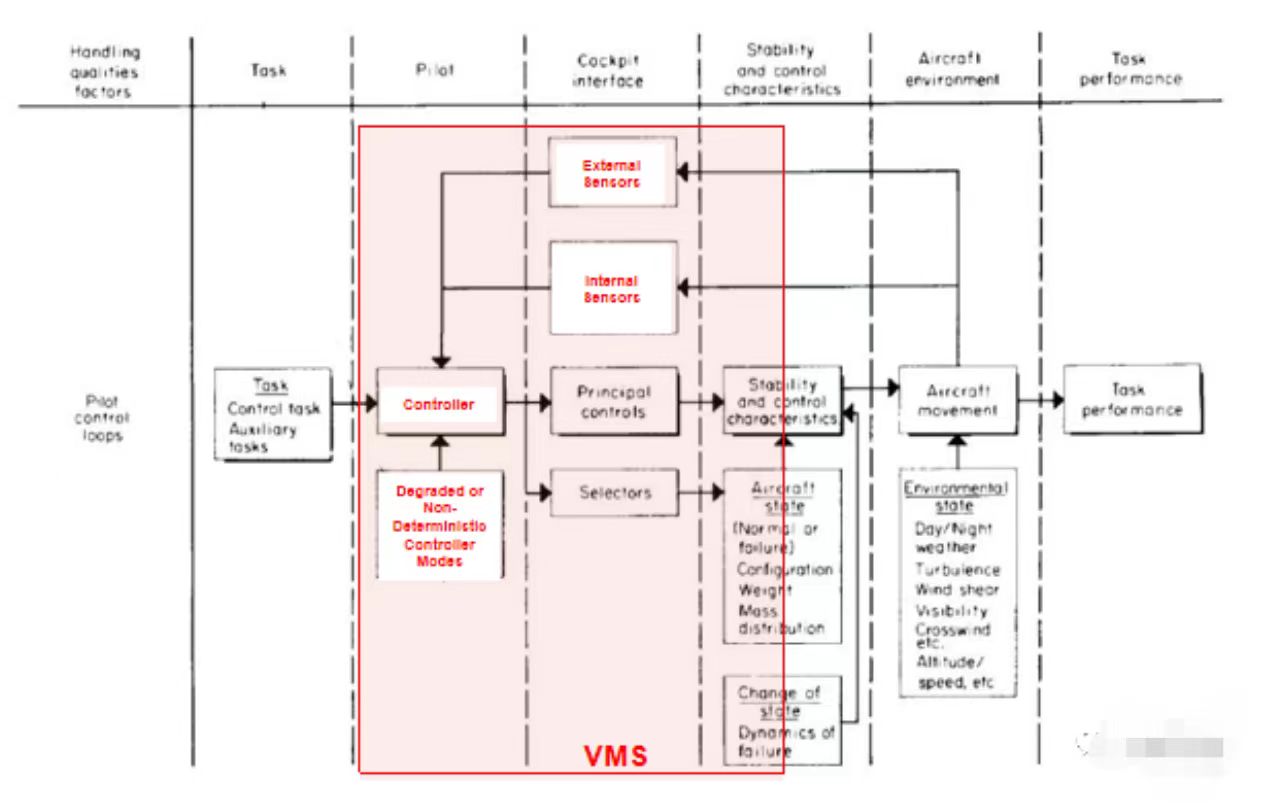
VMS(整机管理系统)包含的部分
在现实的开发中,对于大型的无人机已经考虑了载人定量操纵品质的要求;而对于小型无人机方面,目前很少考虑操纵或者任务品质的评估;更进一步对于今天的eVTOL,无论是有人驾驶(SVO)还是无人驾驶,其实都已经将整机管理系统纳入到开发工作中,因此对于整机eVTOL的操纵品质设计相当于经被包含进来。更具体的说,目前eVTOL更偏向于满足任务的乘客品质设计,这方面的工作NASA已经做了很多研究;而大量的无人机则是要建立任务品质设计的驱动过程。
